
<
সার্ভো মোটরঃ
একটি Servo Motor অন্য সাধারণ ইলেকট্রিক মোটরের মতই। কিন্তু এর স্পেশাল ভিন্নতা হলো সার্ভো মেকানিজম। একটা সাধারণ ডিসি/এসি মোটরে যদি সাপ্লাই দেওয়া হয়, তাহলে সাথে সাথে মোটরটি ঘুড়তে শুরু করবে। কিন্তু সাপ্লাই খুলে নিলে সাথে সাথে বন্ধ হয়না। কারণ, মোটরের জড়তা এবং এর ওজনের জন্য কিছুটা সময় পরে বন্ধ হয়। কিন্তু সার্ভো মোটর এই দিক দিয়ে সম্পূর্ণ আলাদা। সাধারণ মোটরের মত শুধু সাপ্লাই ভোল্টেজ দিলেই এই মোটর ঘুড়বে না। এর জন্য আলাদা করে PWM সিগন্যাল দিতে হবে। এই সিগন্যাল ড্রাইভার বা মাইক্রোকন্ট্রোলার ব্যবহার করে দিতে হয়। PWM সিগন্যাল দেওয়ার পর মোটরটি ঘুড়তে শুরু করবে। যদি PWM সিগন্যাল বন্ধ করে দেওয়া হয়, তাহলে সাথে সাথে মোটরটি বন্ধ হয়ে যাবে। সার্ভো মোটরকে একটা নির্দিষ্ট ডিগ্রীতে ঘুড়ানো যাবে। হতে পারে তা ১০ ডিগ্রী কিংবা ১৫ ডিগ্রী ।

সাধারণ মোটর থেকে সার্ভো মোটরের মধ্যে ডিসি মোটর ছাড়াও অতিরিক্ত যে এলিমেন্টগুলো থাকে তা হলো, গিয়ার বক্স, ইনকোডার বা পটেনশিওমিটার এবং কন্ট্রোল সার্কিট। আর এই পুরো সিস্টেমকে বলা হয়, ক্লোজ লুপ সিস্টেম।
Servo মোটর কোথায় ব্যবহার করা হয়?
যে সকল যায়গায় প্রিসাইজ পজিশন কন্ট্রোলের প্রয়োজন হয়, সে সকল যায়গায় Servo Motor ব্যবহার হয়ে থাকে।
যেমনঃ
- সিএনসি মেশিন
- কাটিং মেশিন
- রোবটিক্স
- পাঞ্চিং মেশিন
- প্যাকিং মেশিন
- প্রিন্টিং মেশিন
- ইলেকট্রনিক ম্যানুফেকচারিং মেশিন।
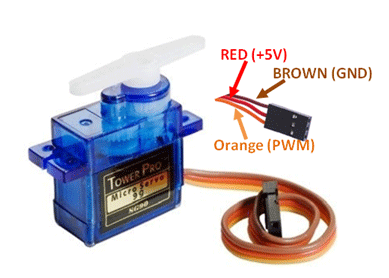
Servo মোটরের পিন ডায়াগ্রামঃ
জয়স্টিক সুইচঃ
জয়স্টিক সুইচ মূলত একটি কম্ব সুইচ। সাধারনত এর মধ্যে কয়েকটি সুইচ থাকে। যেমন X-Axis পটেনশিওমিটার, Y-Axis পটেনশিওমিটার এবং পুশ সুইচ। পটেনশিওমিটারের মাধ্যমে Arduino তে এনালগ সিগন্যাল পাঠানো হয়। আরডুইনো এনালগ সিগন্যাল রিড করে। এই এনালগ ভ্যালুর উপর নির্ভর করে আউটপুটে একটি ডিজিটাল সিগন্যাল পাঠানো হয়ে থাকে। যেহেতু এক্সপেরিমেন্টে সার্ভো মোটর রয়েছে, তাহলে বুঝাই যাচ্ছে, এই মোটরকে নিয়ন্ত্রণ করবে জয়স্টিক সুইচ। অর্থাৎ জয়স্টিকের ভ্যালুর (০-১০২৩) উপর ভিত্তি করেই সার্ভো কন্ট্রোল করা হবে।

প্রয়োজনীয় কম্পোনেন্টঃ
এক্সপেরিমেন্ট করার সময়, কিছু কম্পোনেন্ট প্রয়োজন হবে। যার তালিকা প্রদান করা হলো। সবগুলো কম্পোনেন্ট Arduino Advance Learning Kit এর বক্সের মধ্যে রয়েছে। কিন্তু যারা এই এক্সপেরিমেন্ট করতে উৎসাহিত হবেন, তাদের জন্য নিচের দেওয়া লিস্ট থেকে সংগ্রহ করে নিতে পারবেন।
| ক্রমিক নং | কম্পোনেন্টের নাম | মডেল | পরিমাণ | লিংক |
| ১ | Arduino Uno R3 SMD | ARD-00119 | ১টি | কম্পোনেন্ট লিংক |
| ২ | Servo Motor | ROB-00010 | ১টি | কম্পোনেন্ট লিংক |
| ৩ | Joystick Switch | MIS-00092 | ১টি | কম্পোনেন্ট লিংক |
| ৪ | Breadboard (830 Point) | MIS-00002 | ১টি | কম্পোনেন্ট লিংক |
| ৫ | Silicone Jumper Wire (Male to Female) | C&C-00246 | প্রয়োজনমত | কম্পোনেন্ট লিংক |
| ৬ | Silicone Jumper Wire (Male to Male) | C&C-00245 | প্রয়োজনমত | কম্পোনেন্ট লিংক |
সার্কিট ডায়াগ্রামঃ
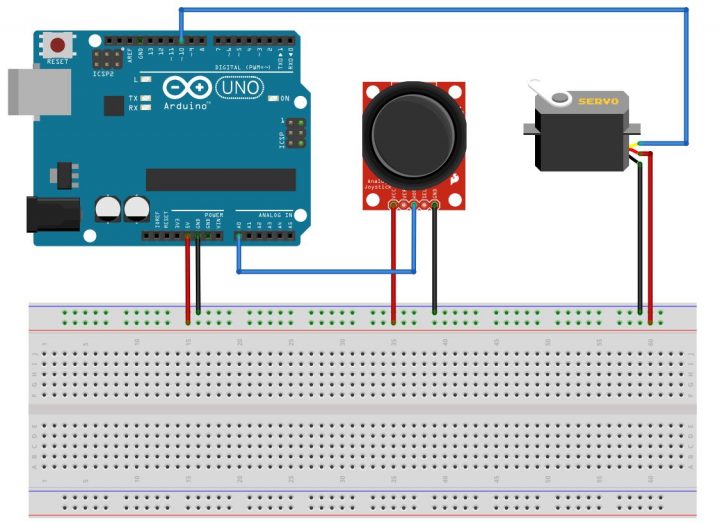
সার্কিট সংযোগ খুব সহজ পদ্ধতিতে রয়েছে। একবার দেখলেই বুঝতে পারবেন।
ডেমো কোডঃ
#include<Servo.h>
Servo servo;
int x_axis;
int servo_val;
void setup()
{
pinMode(A0,INPUT);
servo.attach(10);
}
void loop()
{
x_axis=analogRead(A0);
servo_val=map(x_axis,0,1023,0,180);
servo.write(servo_val);
delay(15);
}
ভিডিওঃ
সতর্কতাঃ
১। যেকোন সার্ভো মোটর ব্যবহারের পূর্বে তার রেটিং জেনে ভোল্টেজ সাপ্লাই দিতে হবে।
২। কানেকশনের ক্ষেত্রে অবশ্যই মোটরের পিন ডায়াগ্রাম দেখে নিতে হবে।
Arduino দিয়ে কিভাবে Fingerprint Sensor ব্যবহার করতে হয়? দেখতে ভিজিট করুন।]]>


