
<
এখন এখানে ক্লিক করে AccelStepper লাইব্রেরীটি ডাউনলোড করে নিন । এবং Arduino IDE টি ওপেন করে নিচের প্রোগ্রামটুকু টাইপ করুন ।
#include <AccelStepper.h>
// Motor pin definitions:
#define motorPin1 2 //IN1 on the Stepper Motor Driver
#define motorPin2 3 //IN2 on the Stepper Motor Driver
#define motorPin3 4 //IN3 on the Stepper Motor Driver
#define motorPin4 5 //IN4 on the Stepper Motor Driver
/*
* 28BYJ-48 Stepper Motor Technical Specifications:
* >> Rated Voltage: 5V DC
* >> Number of Phases: 4
* >> Stride Angle: 5.625°/64
* >> Gear ratio is 64:1 (Exactly = 63.68395:1)
* >> Approximately 4076 steps per full revolution (in half step mode).
* >> Pull in torque: 300 gf.cm
* >> Insulated Power: 600VAC/1mA/1s
* >> Coil: Unipolar 5 lead coil
*/
// Define the AccelStepper interface type; 4 wire motor in half step mode:
#define MotorInterfaceType 8 // FUNCTION = 0, DRIVER = 1, FULL2WIRE = 2, FULL3WIRE = 3, FULL4WIRE = 4, HALF3WIRE = 6, HALF4WIRE = 8
// Initialize with pin sequence IN1-IN3-IN2-IN4 for using the AccelStepper library with 28BYJ-48 stepper motor:
AccelStepper stepper = AccelStepper(MotorInterfaceType, motorPin1, motorPin3, motorPin2, motorPin4);
void setup()
{
stepper.setMaxSpeed(1000); //Set the maximum steps per second.
}
void loop()
{
StepperCW(1000); //StepperCW(motorSpeed);
delay(2000);
StepperCCW(1000); //StepperCCW(motorSpeed);
delay(2000);
StepperRevolutionCW(1000, 1); //StepperRevolutionCW(motorSpeed, motorRevolution);
delay(2000);
StepperRevolutionCCW(1000, 1); //StepperRevolutionCCW(motorSpeed, motorRevolution);
delay(2000);
}
void StepperCW(uint16_t motorSpeed)
{
stepper.setSpeed(motorSpeed);
stepper.runSpeed();
}
void StepperCCW(uint16_t motorSpeed)
{
int16_t _motorSpeed = (motorSpeed * (-1));
stepper.setSpeed(_motorSpeed);
stepper.runSpeed();
}
void StepperRevolutionCW(uint16_t motorSpeed, uint16_t motorRevolution)
{
stepper.setCurrentPosition(0); //Set the current position to 0.
while (stepper.currentPosition() != (motorRevolution * 4096))
{
stepper.setSpeed(motorSpeed);
stepper.runSpeed();
}
}
void StepperRevolutionCCW(uint16_t motorSpeed, uint16_t motorRevolution)
{
int16_t _motorSpeed = (motorSpeed * (-1));
int16_t _motorRevolution = ((motorRevolution * 4096) * (-1));
stepper.setCurrentPosition(0); //Set the current position to 0.
while (stepper.currentPosition() != _motorRevolution)
{
stepper.setSpeed(_motorSpeed);
stepper.runSpeed();
}
}
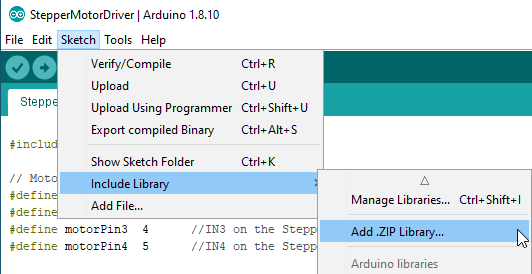
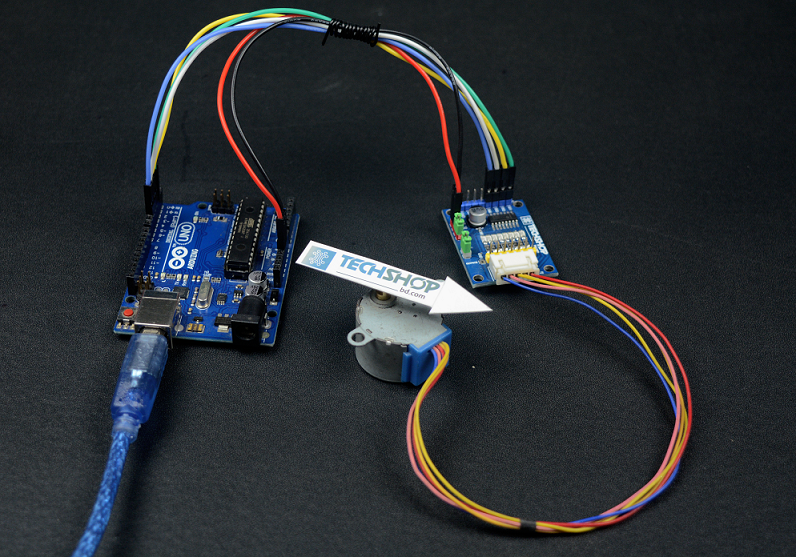
ডাউনলোডকৃত AccelStepper-এর ZIP ফাইলটির লোকেশন (directory) দেখিয়ে দিন । এবার প্রোগ্রামটি Arduino UNO-তে আপলোড করুন ।
ব্যাস! কাজ শেষ । Let’s Enjoy !
Project Video
]]>


